线性代数-特征值和特征向量-21
Linear Algebra-特征值和特征向量-21
一、知识概要
本节课我们一起来讨论特征值与特征向量这个线性代数中非常重要的概念。我们的主要目标是掌握求特征值的基本技巧,同时对一些特殊情况进行说明。整体来说,本节内容比较基础,是我们深入学习特征值相关知识的起点。
二、特征值与特征向量
2.1 释义
首先,我们给出特征值与特征向量的定义:对于矩阵 ( A ),如果满足:
那么 ( x ) 就称为矩阵 ( A ) 的特征向量,( \lambda ) 称为矩阵 ( A ) 的特征值。
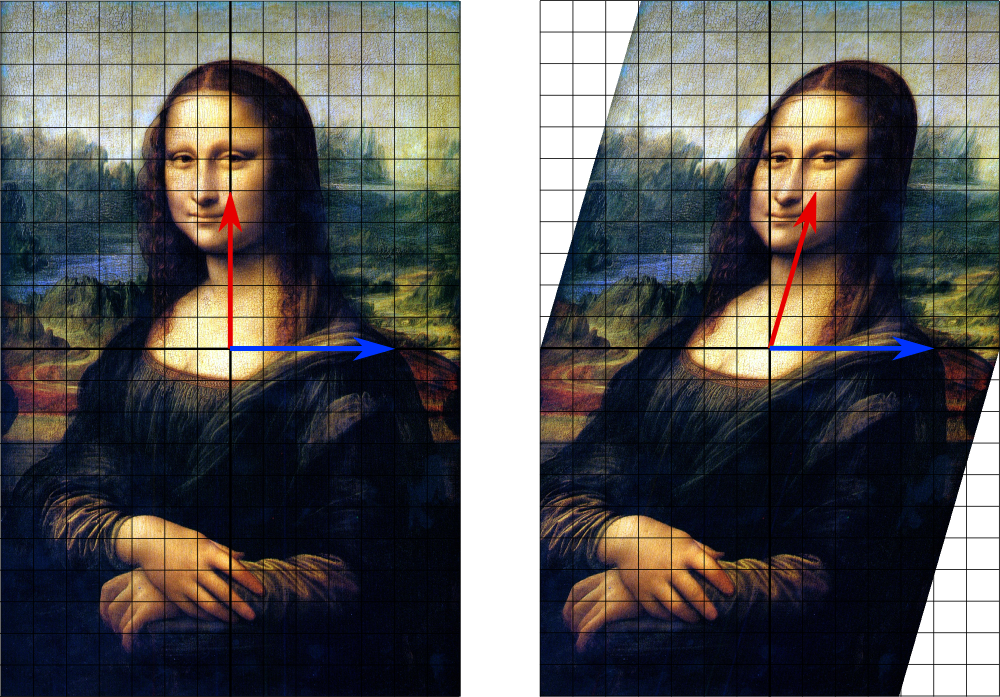
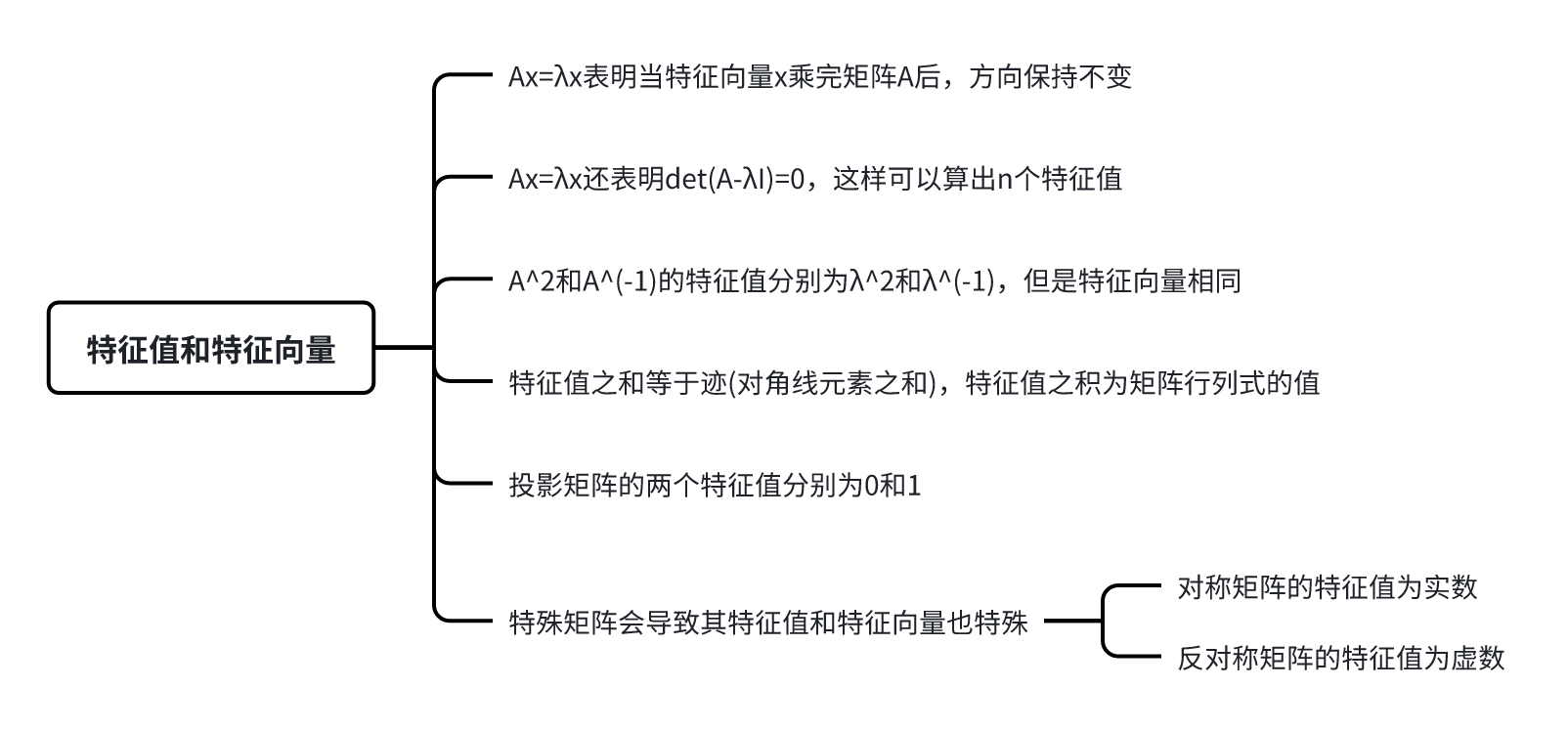
那么,该如何直观理解特征值与特征向量代表的意义呢?我们来看 ( Ax ) 这个式子,对于不同的向量 ( x ),( Ax ) 其实就像是一个函数——输入一个向量 ( x ),输出一个向量 ( Ax )。而在我们输入的众多向量 ( x ) 生成的 ( Ax ) 中,会有一些特殊的 ( Ax ),它们保持与原向量 ( x ) 方向平行,我们就用上面这个式子 ( Ax=\lambda x ) 来表示这个平行关系。
这里我们特别注意一下特征值为 0的情况。此时会有:( AX = 0 )。不难发现,如果 ( A ) 是不可逆矩阵,它正好满足这个性质。也就是说,矩阵不可逆当且仅当它包含 0 特征值,这个对应关系非常重要。
我们再来研究一下之前提到过的投影矩阵,如果投影矩阵就是 ( A ),那么它的特征值会是多少呢?
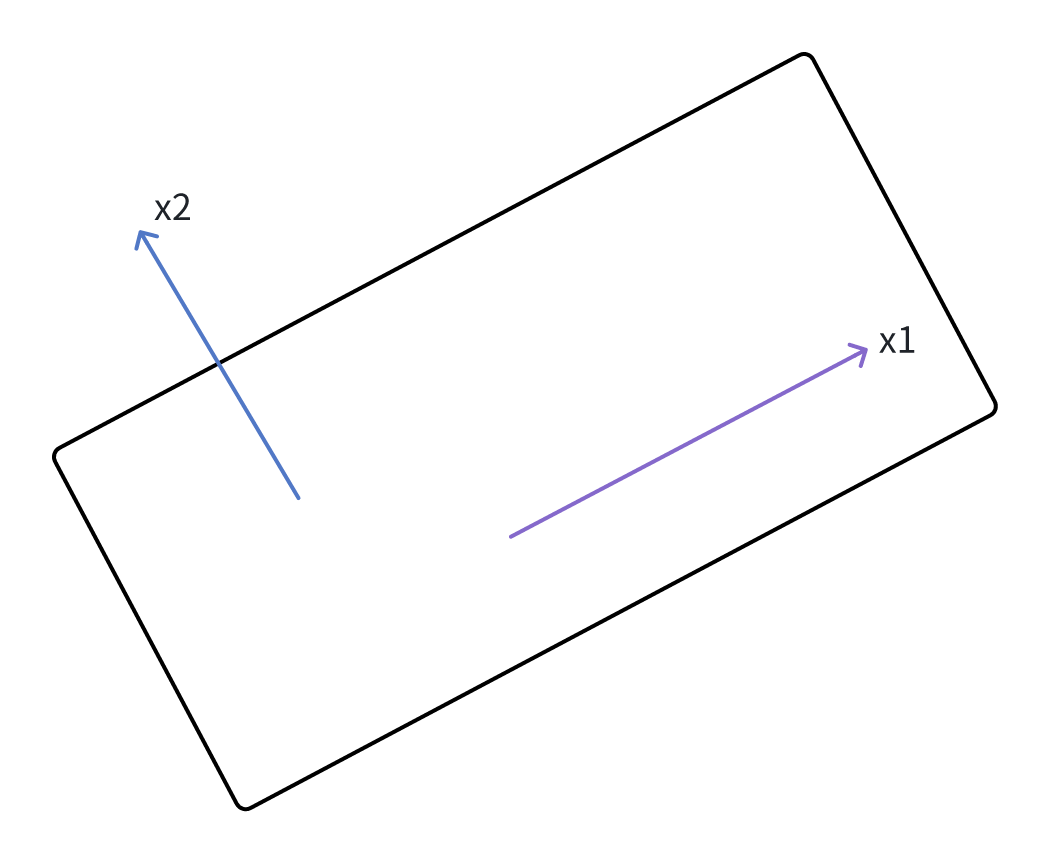
我们取两种比较特殊的向量来分析:
(1) 如果 ( x_1 ) 本身就在投影平面上,那么投影矩阵不会改变它的大小和方向,所以恒有 ( Ax_1 = x_1 ) 成立。此时我们得到一个特征值 ( \lambda ):1。
(2) 如果 ( x_2 ) 垂直于投影平面,那么投影矩阵作用在这个向量之后会把它压缩到零向量,也就是 ( Ax_2 = 0 ) 恒成立。这样我们就得到第二个特征值 ( \lambda ):0。
这个例子很好地说明了特征值确实描述了矩阵在特定方向上的”缩放因子”,非常直观。
2.2 求解方法
接下来,我们给出特征值、特征向量的一般求解方法。我们从定义方程出发,对它做一些简单变换:
这个方程要有非零解 ( x ),意味着 ( (A - \lambda I) ) 必须是不可逆矩阵,也就是:
这就是求解特征值的基本步骤。对于 ( n ) 阶矩阵来说,这个行列式展开后是一个 ( n ) 次多项式,所以一共应该有 ( n ) 个特征值(考虑重数)。
求解特征向量就比较简单了:只需要把求解出的每个特征值 ( \lambda ) 代入,此时 ( A - \lambda I ) 确实是一个不可逆矩阵,我们求解方程 ( (A - \lambda I)X = 0 ),得到的零空间中的非零向量就是对应这个特征值的特征向量。
我们通过一个具体例子来看看这个过程:
【例 1】求矩阵(\begin{bmatrix}3 & 1\1 & 3\end{bmatrix})的特征向量与特征值。
按照我们上述思路,首先构造矩阵 ( A - \lambda I = \begin{bmatrix}3 - \lambda & 1\1 & 3 - \lambda\end{bmatrix} ),令行列式等于 0 即可:
解得两个特征值:( \lambda_1 = 2 ),( \lambda_2 = 4 ) 。
接下来求解特征向量:直接代入特征值进行消元求解。
对于 ( \lambda_2 = 4 ):
即求解 ( \begin{bmatrix}-1 & 1\1 & -1\end{bmatrix}X = 0 ),解得 ( x_1=\begin{bmatrix}1\1\end{bmatrix} ) 就是对应特征向量。
对于 ( \lambda_1 = 2 ):
即求解 ( \begin{bmatrix}1 & 1\1 & 1\end{bmatrix}x = 0 ),解得 ( x_2=\begin{bmatrix}-1\1\end{bmatrix} ) 就是对应特征向量。
注:在这里提醒大家注意一点,我们很容易发现:( \lambda_1+\lambda_2 = 6 ),这正好等于矩阵对角线上元素 3 + 3 的和,这个和我们称为矩阵的迹。特征值之和等于矩阵的迹,这是一个重要的定理。另外,我们又有 ( \lambda_1\lambda_2 = 8 ),这正好就是行列式 ( \det\begin{bmatrix}3 & 1\1 & 3\end{bmatrix} ) 的值,这也是一个普遍规律——特征值之积等于矩阵 A 的行列式的值。这两个性质非常有用,往往可以用来验证我们的计算结果是否正确。
看完第一个例子,我们再来思考一个相关问题:
【例 2】在例 1 的基础上,如果新矩阵 ( A=\begin{bmatrix}3 & 1\1 & 3\end{bmatrix}+3I ),那么它的特征值、特征向量将如何变化?
其实这个问题很简单,我们从核心等式 ( Ax=\lambda x ) 出发,根据题意,改变后的方程变为:
也就是说,新的特征值变为 ( \lambda + 3 ),而对应的特征向量不会改变。因为等式两边同等地加上了 ( 3Ix = 3x ),不会影响特征向量的方向,只会改变缩放的倍数。这个结论其实可以推广:如果 ( A ) 的特征值是 ( \lambda ),那么 ( A + cI ) 的特征值就是 ( \lambda + c ),特征向量不变。记住这个小结论很有用。
2.3 特殊情况说明
接下来我们通过两个例题,来说明一下求解过程中可能遇到的特殊情况,帮助大家开阔思路。
【例 3】旋转矩阵 ( Q ) 把每个向量旋转 90°,记 ( Q=\begin{bmatrix}0 & -1\1 & 0\end{bmatrix} )(这其实就是旋转矩阵的标准形式 ( \begin{bmatrix}\cos90^{\circ} & -\sin90^{\circ}\\sin90^{\circ} & \cos90^{\circ}\end{bmatrix} )),试求解特征值与特征向量。
我们先从之前学到的迹和行列式的性质来分析一下:
首先,特征值乘积等于行列式:( \lambda_1\lambda_2 = \det(Q) = 1 )
其次,特征值和等于迹:
那这样是不是说明特征值不存在呢?我们换一种思路,直接从定义 ( Qx=\lambda x ) 出发,化简求解 ( \det(Q - \lambda I) = 0 ):
解得 ( \lambda ) 为虚数:( i ) 与 ( -i )。代入原方程,它们完全满足定义式。所以特征值其实是存在的,只不过它们是虚数而已。
从这个例子我们得到一个重要启示:我们发现 ( Q ) 是反对称矩阵(满足 ( A^T = -A )),而我们之前求的例子都是对称矩阵,它们的特征值都是实数。也就是说,对称矩阵的特征值为实数,而反对称矩阵的特征值为纯虚数,这是两个非常典型的情况。
我们再来看第二个特殊例子:
【例 4】( A=\begin{bmatrix}3 & 1\0 & 3\end{bmatrix} ),求特征值与特征向量。
同样按照标准步骤来,这是个上三角矩阵,在求解 ( \det(A-\lambda I) ) 时我们会发现,上三角矩阵的行列式等于对角线元素乘积,所以:
因此得到 ( \lambda_1=\lambda_2 = 3 ),这是一个重特征值。现在我们来求它的特征向量,代入 ( A - 3I = \begin{bmatrix}0 & 1\0 & 0\end{bmatrix} ),方程 ( (A-3I)x = 0 ) 的零空间维数是多少呢?不难发现,只有一个线性无关的解,也就是说,这个情况下特征向量短缺,只有一个线性无关的特征向量,而不是两个。
这个例子告诉我们,当矩阵有重特征值时,特征向量的个数不一定等于特征值的重数,可能会更少。三角矩阵如果对角线上出现重复元素,就容易出现这种情况。
三、学习感悟
本节内容不是很困难,重点在于特征值与特征向量的求解,其实只要使用(A - \lambda I)求解就没错,特别注意一下虚数情况就好了。重点是理解特征值如何求解以及特征值到底代表着什么。
 微信
微信 支付宝
支付宝